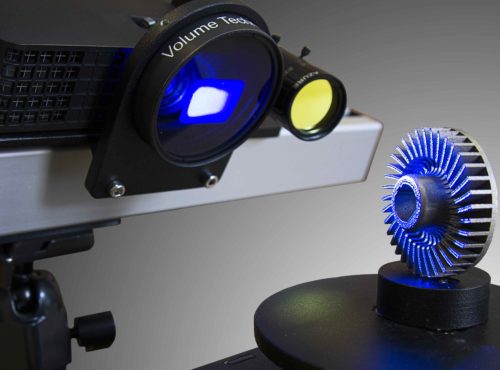

Unter dem Messverfahren Streifenprojektion wird eine Projektion von kodierten Streifenmustern in den Mess- raum unter gleichzeitiger Beobachtung und Aufzeich- nung des verzehrten Streifenmusters mittels eines Detektors (Kamera) verstanden. Das Funktionsprinzip ist sehr ähnlich dem des Lichtschnittverfahrens. Zur schnelleren und genaueren Oberflächenvermessung werden jedoch gleichzeitig mehrere Streifenmuster in die Messszene projiziert. Zur eindeutigen Unterschei- dung der Streifen sind sie kodiert.
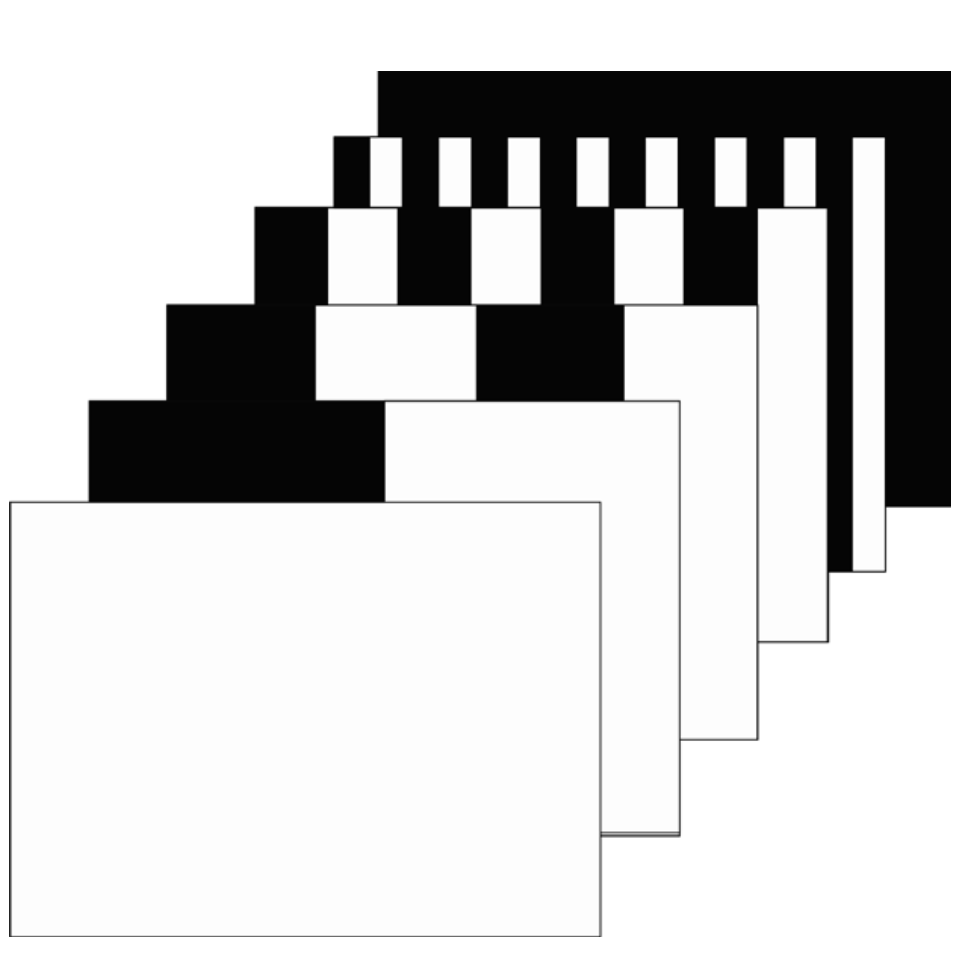
Die Bestimmung der 3D-Messobjektoberfläche erfolgt über die sogenannte aktive Triangulation. Sie zeichnen sich dadurch aus, dass eine Folge von Mustern verwenden werden, die nacheinander in die Messszene eingeblendet werden. Um die Anzahl der Muster zu begrenzen, bedient man sich einer binären Codierung der Streifenmuster. Die Qualität der projizierten Strukturen hat einen entscheidenden Einfluss auf die Genauigkeit einer Messung. Nach Auswertung der von der Oberfläche des Messobjektes reflektierten Streifenmuster werden die 3D-Koordinaten für jeden Sensorpunkt berechnet. Innerhalb von wenigen Sekunden werden also Millionen von Messpunkten erfasst.
Um eine oder auch zwei Kameras für die 3D-Vermessung verwenden zu können, muss sie zunächst kalibriert werden. Da die Abbildung der Geometrieinformationen auf einem Kamerachip zweidimensional erfolgt und die Tiefeninformation dadurch verloren geht, müssen die Abbildungseigenschaen der verwendeten Optik bekannt sein, um eine Orientierung im Weltkoordinatensystem zu definieren. Je nach Messvolumen bzw. Messobjektgröße stehen vier unterschiedliche Kalibriertafeln zur Verfügung. Der Kalibriervorgang ist in wenigen Minuten durchführbar und wird lediglich dann wiederholt, wenn bspw. die Positionen der Komponenten verändert werden.
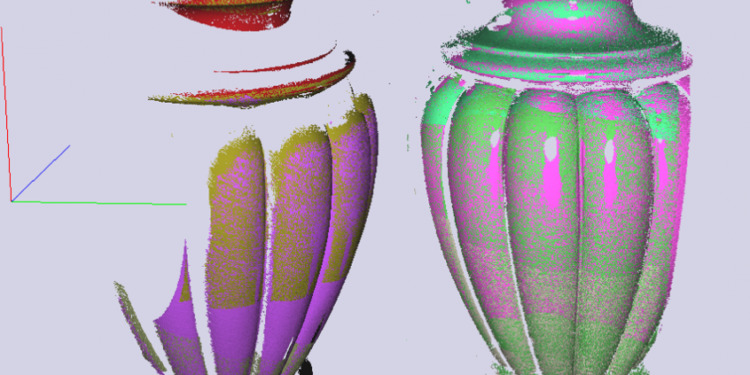
Durch eine einzelne Aufnahme des Messobjektes kann die komplette Geometrie nicht erfasst werden. Das macht ein rechnergestütztes Zusammenführen von einzelnen, aufeinander folgenden Scanns notwendig. Bei Verwendung von Messmarken oder eines Rotationstisches erfolgt das Zusammenführen vollständig automatisiert ab. Anderenfalls ist die Software jedoch auf die Unterstützung des Bedieners bei der Verrechnung der Punktewolken angewiesen. Durch den Anwender wird eine grobe Vorausrichtung der Scans durchgeführt. Die Feinausrichtung erfolgt wiederum automatisiert. Nach der Verrechnung der einzelnen Aufnahmen steht eine Punktewolke zur Verfügung, die zu einem Model verrechnet werden kann.
Nach dem Durchführen von Messungen steht eine ganze Reihe an gängigen Ausgabeformaten zur Verfügung. Außerdem können die Messdaten vor dem Exportieren mittels zahlreicher Funktionen bearbeitet werden. Es können beispielsweise Lücken im Netz geschlossen werden.